New remote-controlled large-volume pressurization system commissioned at 16-BM-B
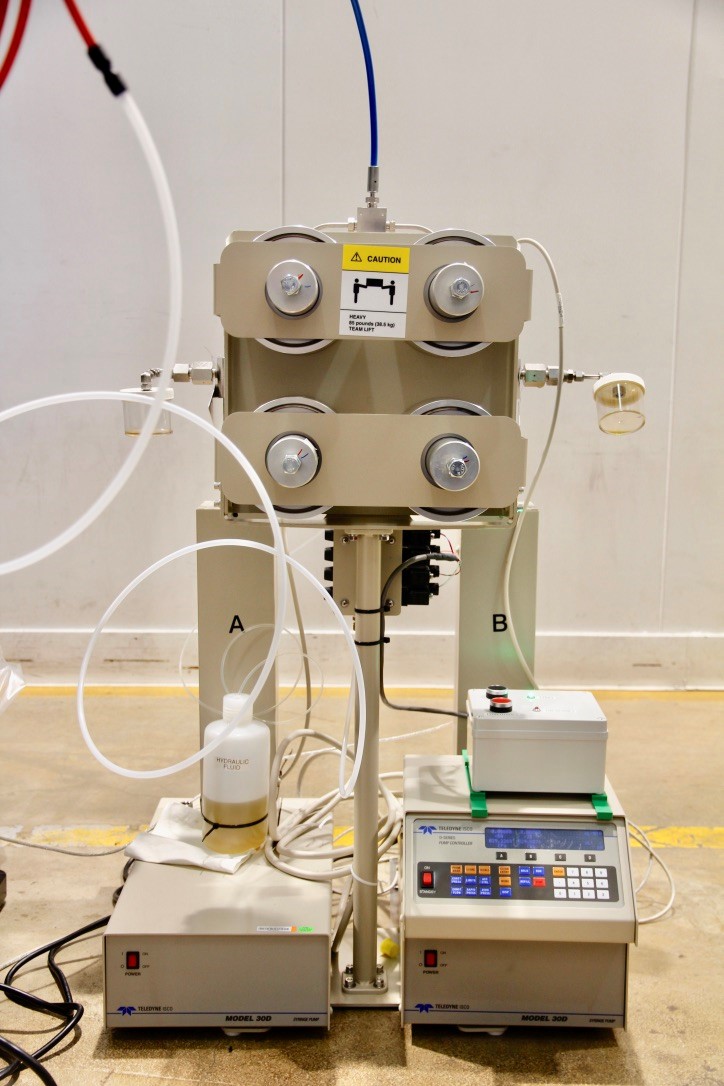
Enabling remotely controlled beamline experiments has been a challenge for research based on the large-volume press. Precise hydraulic control of the oil pressure – used to drive the Paris Edinburgh (PE) press at 16-BM-B – was previously done by a manual pumping system, which excluded the possibility to perform remotely controlled experiments. A strategy chosen to enable remote control of pressure was to include a motorized and computer-controlled pressurization system. A commercial high-pressure dual syringe pump system, Teledyne ISCO 30D, was chosen for this purpose. The system’s two pumps, operating in concert, enable seamless control of the pressure setpoint for the remote users of the beamline. The new system is capable of reaching pressure set-points faster than the previously used manual pumps – greatly improving the beamtime use efficiency. In addition, the system offers exceptional low-flow stability, which translates to an improved stability for the PE cell and on-sample pressure. On top of the factory provided capabilities of the syringe pump system, the teams at the HPCAT and the X-ray Science Division have made additional design additions in terms of software, valve controllers, and safety features that have enabled increased autonomy in precise pressure control for compression as well as de-compression experiments at the beamline. EPICS software computer interface simplifies the end-user operation – an important design parameter since the pumping system is the most used component of the high-pressure experiments at 16-BM-B. HPCAT’s new pressurization system has enabled the first ever fully remotely-controlled large-volume high-pressure experiments at a synchrotron beamline.
